ପରିଚୟ
୧୯୬୦ ଦଶକର ଶେଷ ଭାଗ ଏବଂ ୧୯୭୦ ଦଶକର ପ୍ରାରମ୍ଭରୁ, ଅଧିକାଂଶ ପାରମ୍ପରିକ ବାୟୁ ଫଟୋଗ୍ରାଫି ପ୍ରଣାଳୀକୁ ବାୟୁବାହୀ ଏବଂ ଅନ୍ତରୀକ୍ଷ ଇଲେକ୍ଟ୍ରୋ-ଅପ୍ଟିକାଲ୍ ଏବଂ ଇଲେକ୍ଟ୍ରୋନିକ୍ ସେନ୍ସର୍ ସିଷ୍ଟମ ଦ୍ୱାରା ବଦଳାଯାଇଛି। ପାରମ୍ପରିକ ବାୟୁ ଫଟୋଗ୍ରାଫି ମୁଖ୍ୟତଃ ଦୃଶ୍ୟମାନ-ଆଲୋକ ତରଙ୍ଗଦୈର୍ଘ୍ୟରେ କାର୍ଯ୍ୟ କରୁଥିବା ବେଳେ, ଆଧୁନିକ ବାୟୁବାହୀ ଏବଂ ଭୂମି-ଆଧାରିତ ଦୂର ସେନ୍ସିଂ ପ୍ରଣାଳୀ ଦୃଶ୍ୟମାନ ଆଲୋକ, ପ୍ରତିଫଳିତ ଇନଫ୍ରାରେଡ୍, ତାପଜ ଇନଫ୍ରାରେଡ୍ ଏବଂ ମାଇକ୍ରୋୱେଭ୍ ବର୍ଣ୍ଣାଳୀ ଅଞ୍ଚଳଗୁଡ଼ିକୁ ଆଚ୍ଛାଦନ କରୁଥିବା ଡିଜିଟାଲ୍ ତଥ୍ୟ ଉତ୍ପାଦନ କରେ। ବାୟୁ ଫଟୋଗ୍ରାଫିରେ ପାରମ୍ପରିକ ଦୃଶ୍ୟ ବ୍ୟାଖ୍ୟା ପଦ୍ଧତିଗୁଡ଼ିକ ଏପର୍ଯ୍ୟନ୍ତ ସହାୟକ। ତଥାପି, ଦୂର ସେନ୍ସିଂ ବିଭିନ୍ନ ପ୍ରକାରର ପ୍ରୟୋଗକୁ କଭର କରେ, ଯେଉଁଥିରେ ଲକ୍ଷ୍ୟ ଗୁଣଧର୍ମର ତାତ୍ତ୍ୱିକ ମଡେଲିଂ, ବସ୍ତୁଗୁଡ଼ିକର ବର୍ଣ୍ଣାଳୀ ମାପ ଏବଂ ସୂଚନା ନିଷ୍କାସନ ପାଇଁ ଡିଜିଟାଲ୍ ପ୍ରତିଛବି ବିଶ୍ଳେଷଣ ଭଳି ଅତିରିକ୍ତ କାର୍ଯ୍ୟକଳାପ ଅନ୍ତର୍ଭୁକ୍ତ।
ଦୂର ସେନ୍ସିଂ, ଯାହା ଅଣ-ସଂପର୍କ ଦୀର୍ଘ-ଦୂରତା ଚିହ୍ନଟ କୌଶଳର ସମସ୍ତ ଦିଗକୁ ବୁଝାଏ, ଏକ ପଦ୍ଧତି ଯାହା ଲକ୍ଷ୍ୟର ବୈଶିଷ୍ଟ୍ୟଗୁଡ଼ିକୁ ଚିହ୍ନଟ, ରେକର୍ଡ ଏବଂ ମାପ କରିବା ପାଇଁ ବିଦ୍ୟୁତ୍ ଚୁମ୍ବକୀକରଣ ବ୍ୟବହାର କରେ ଏବଂ ଏହି ପରିଭାଷା ପ୍ରଥମେ 1950 ଦଶକରେ ପ୍ରସ୍ତାବିତ ହୋଇଥିଲା। ଦୂର ସେନ୍ସିଂ ଏବଂ ମ୍ୟାପିଂ କ୍ଷେତ୍ର, ଏହାକୁ 2 ସେନ୍ସିଂ ମୋଡରେ ବିଭକ୍ତ କରାଯାଇଛି: ସକ୍ରିୟ ଏବଂ ନିଷ୍କ୍ରିୟ ସେନ୍ସିଂ, ଯାହା ମଧ୍ୟରୁ ଲିଡାର୍ ସେନ୍ସିଂ ସକ୍ରିୟ, ଲକ୍ଷ୍ୟକୁ ଆଲୋକ ନିର୍ଗତ କରିବା ଏବଂ ସେଥିରୁ ପ୍ରତିଫଳିତ ଆଲୋକ ଚିହ୍ନଟ କରିବା ପାଇଁ ନିଜର ଶକ୍ତି ବ୍ୟବହାର କରିବାକୁ ସକ୍ଷମ।
ସକ୍ରିୟ ଲିଡାର୍ ସେନ୍ସିଂ ଏବଂ ପ୍ରୟୋଗ
ଲିଡାର (ଆଲୋକ ଚିହ୍ନଟ ଏବଂ ପରିସର) ଏକ ପ୍ରଯୁକ୍ତିବିଦ୍ୟା ଯାହା ଲେଜର ସିଗନାଲ ନିର୍ଗତ ଏବଂ ଗ୍ରହଣ କରିବାର ସମୟ ଆଧାରରେ ଦୂରତା ମାପ କରେ। କେତେକ ସମୟରେ ଏୟାରବୋର୍ନ ଲିଡାରକୁ ଏୟାରବୋର୍ନ ଲେଜର ସ୍କାନିଂ, ମ୍ୟାପିଂ କିମ୍ବା ଲିଡାର ସହିତ ଅଦଳବଦଳ ଭାବରେ ପ୍ରୟୋଗ କରାଯାଏ।
ଏହା ଏକ ସାଧାରଣ ଫ୍ଲୋଚାର୍ଟ ଯାହା LiDAR ବ୍ୟବହାର ସମୟରେ ପଏଣ୍ଟ ଡାଟା ପ୍ରକ୍ରିୟାକରଣର ମୁଖ୍ୟ ପଦକ୍ଷେପଗୁଡ଼ିକୁ ଦର୍ଶାଉଛି। (x, y, z) ସ୍ଥାନାଙ୍କ ସଂଗ୍ରହ କରିବା ପରେ, ଏହି ବିନ୍ଦୁଗୁଡ଼ିକୁ ସଜାଡ଼ିବା ଦ୍ୱାରା ଡାଟା ରେଣ୍ଡରିଂ ଏବଂ ପ୍ରକ୍ରିୟାକରଣର ଦକ୍ଷତା ଉନ୍ନତ ହୋଇପାରିବ। LiDAR ବିନ୍ଦୁଗୁଡ଼ିକର ଜ୍ୟାମିତିକ ପ୍ରକ୍ରିୟାକରଣ ବ୍ୟତୀତ, LiDAR ମତାମତରୁ ପ୍ରାପ୍ତ ତୀବ୍ରତା ସୂଚନା ମଧ୍ୟ ଉପଯୋଗୀ।
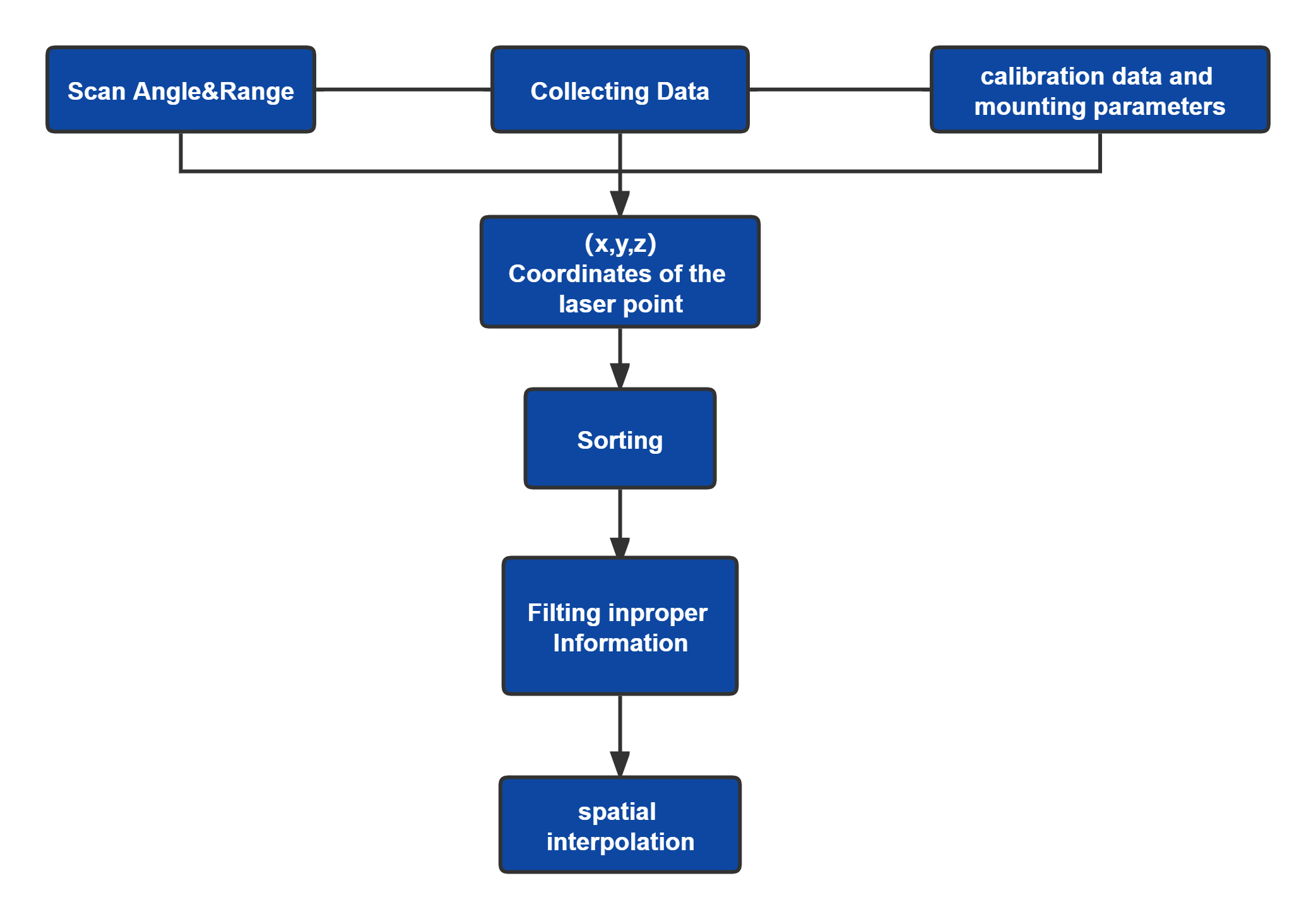
ସମସ୍ତ ରିମୋଟ୍ ସେନ୍ସିଂ ଏବଂ ମ୍ୟାପିଂ ପ୍ରୟୋଗରେ, LiDAR ସୂର୍ଯ୍ୟକିରଣ ଏବଂ ଅନ୍ୟାନ୍ୟ ପାଣିପାଗ ପ୍ରଭାବରୁ ମୁକ୍ତ ଭାବରେ ଅଧିକ ସଠିକ୍ ମାପ ପାଇବାର ସ୍ୱତନ୍ତ୍ର ସୁବିଧା ରଖିଛି। ଏକ ସାଧାରଣ ରିମୋଟ୍ ସେନ୍ସିଂ ସିଷ୍ଟମରେ ଦୁଇଟି ଅଂଶ ଥାଏ, ଏକ ଲେଜର ରେଞ୍ଜଫାଇଣ୍ଡର୍ ଏବଂ ସ୍ଥିତି ପାଇଁ ଏକ ମାପ ସେନ୍ସର, ଯାହା କୌଣସି ଇମେଜିଂ ଜ୍ୟାମିତିକ ବିକୃତି ବିନା 3D ରେ ଭୌଗୋଳିକ ପରିବେଶକୁ ସିଧାସଳଖ ମାପ କରିପାରିବ (3D ବିଶ୍ୱକୁ 2D ସମତଳରେ ପ୍ରତିଛବି କରାଯାଇଛି)।
ଆମର କିଛି ଲିଡାର ସୋର୍ସ
ସେନ୍ସର ପାଇଁ ଆଖି-ସୁରକ୍ଷିତ LiDAR ଲେଜର ସୋର୍ସ ପସନ୍ଦଗୁଡ଼ିକ


